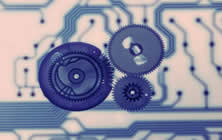
2電極櫛歯角速度センサ(2Lxy) 【解説】 x軸方向に振動している内側のフレーム内の櫛歯に対して、z軸周りの角速度が加わると、コリオリ力が働き外側のフレームがy軸方向に変位する。この変位は、両側に設けられた櫛歯群によって電気的に読み出されます。デバイスは駆動櫛歯部を除いて点対称です。
形状パラメータの定義図 形状パラメータは、形状パラメータの定義図を参照して値を設定して下さい。
パラメータ名
記号
単位
振動櫛歯部
櫛歯間のギャップ
GapOc
m
初期重なり幅
X0Oc
櫛歯の長さ
Loc
櫛歯の幅
Woc
繰り返し数
NumOc
-
検出用櫛歯部
櫛歯間のギャップ1
GapDc1
櫛歯間のギャップ2
GapDc2
X0Dc
Ldc
Wdc
NumDc
内側バネ部
梁の長さ
Lib
梁の幅
Wib
外側バネ部
Lob
Wob
内側フレーム部
表面積
AreaIf
m2
内側バネ部接続の梁の幅
Wsib
外側フレーム部
AreaOf
外側バネ部接続の梁の幅
Wsob
各部共通
構造厚み
Thi
物性パラメータ
ヤング率
young
Pa
密度
density
kg/m3
電気パラメータ
右側電極-櫛歯間電圧
biasVolt1
V
左側電極-櫛歯間電圧
biasVolt2
駆動電圧の振幅
acVoltMag
駆動電圧の周波数
acVoltFreq
Hz
力学パラメータ
角速度
angVelocity
degree/sec
形状パラメータおよび抽出パラメータを設定後押下してください。 ただし、機械構造パラメータを直接設定する場合は、これらの値を設定する必要はありません。
等価回路解析モデル図 機械構造パラメータは、等価回路解析モデル図を参照して値を設定して下さい。
値
rad/sec*
駆動電圧の角周波数
駆動櫛歯静的容量
Cac
F
駆動櫛歯の重なり長さ
Xac
検出櫛歯1静的容量
C1
検出櫛歯1ギャップ
gap1
検出櫛歯1バイアス
検出櫛歯2静的容量
C2
検出櫛歯2ギャップ
gap2
検出櫛歯2バイアス
質量
massX
kg
massY
バネ定数
kSpringX
N/m
kSpringY
機械抵抗
Rfy
Ns/m
(*) ラジアン単位に注意
ネットリストを生成後、ダウンロードできます。機械構造パラメータを設定してから押下してください。